
动态复杂场景下的仿生眼视觉系统
此成果由企业与中科院微系统所团队联合开发,具有避震、检测识别、注视跟踪、3D重建、避障导航等诸多特性,旨在为动态复杂场景下的机器人、无人机、无人车、安防等领域提供可靠、高性能、通用化、智能化的视觉系统解决方案。
装备制造
样机(样品)
技术详情
一、仿生双眼视觉系统
仿生双眼视觉系统是基于对人眼的生物结构、运动神经控制系统的深入研究仿生实现而成,具有避震、检测识别、注视跟踪、3D重建、避障导航等诸多特性,旨在为动态复杂场景下的机器人、无人机、无人车、安防等领域提供可靠、高性能、通用化、智能化的视觉系统解决方案。
产品参数:
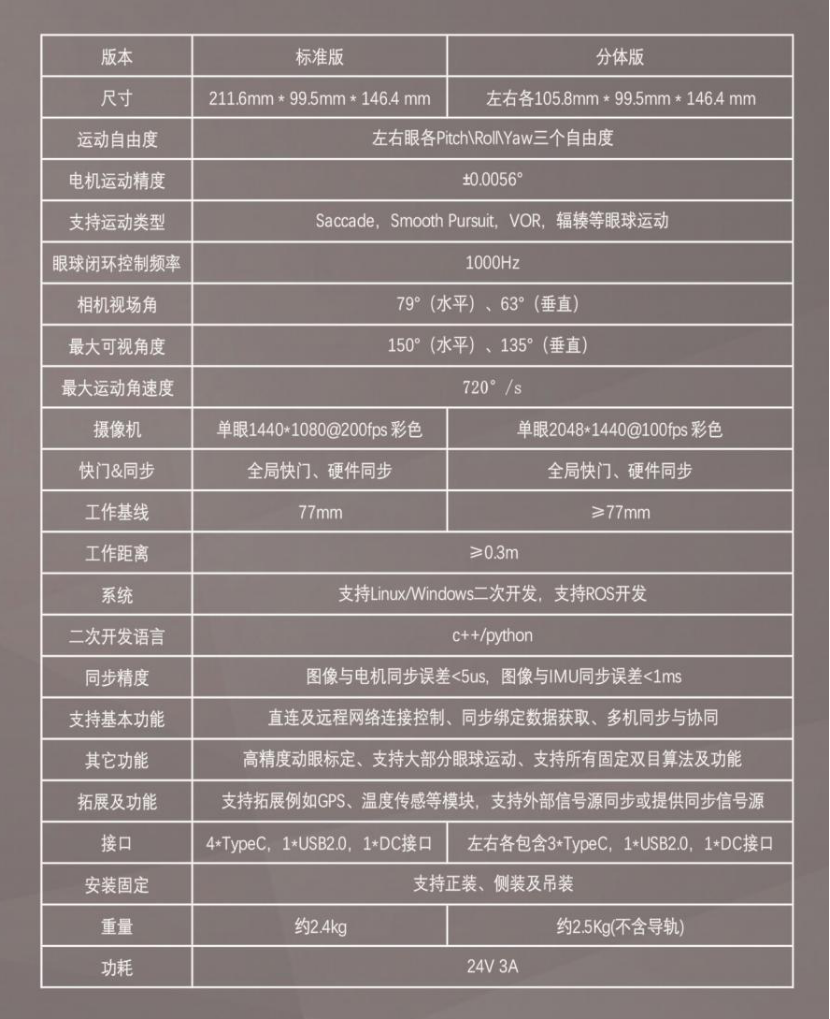
二、仿生鹰眼简介:
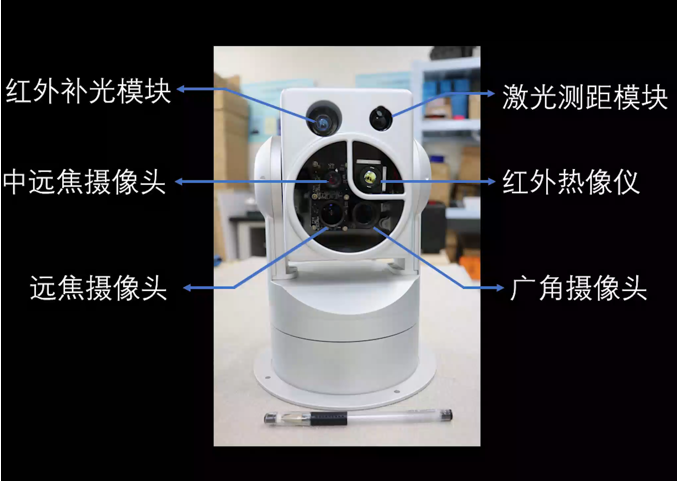
硬件与结构:
- 基于全自主研发的仿生眼控制系统开发而来
- 三个独立运动自由度:Pitch、Roll、Yaw,可实现全覆盖观测范围
- 搭载了远、中、近焦三种高清同步摄像机
- 搭载了远红外热像仪、激光测距仪、红外补光、姿态传感器等模块
- 支持外连GPS等拓展模块
- 支持防水防尘设计
计算处理平台
- 内置低功耗嵌入式控制处理器,可实现设备模块管理与运动控制算法实现
- 可根据需求选择外部计算处理平台,并且同步支持远程网络连接、访问、控制等,支持多设备同时访问
其它
- 多鹰眼支持硬件同步直连交互
- 两台及以上鹰眼间隔一定距离摆放可实现超远距离立体视觉功能
相关技术指标:
- 单鹰眼转动范围:-25°~+45°(Pitch)、±17°(Roll)、±170°(Yaw)
- 单鹰眼分辨率(2448*2048, 7.77°*6.5°)(2048*1536, 33.7°*25.3°)(2048*1536, 101°*76°)红外热像仪(640*512, 33.5°*26.9°)
- 图像观测分辨率最高达0.003°/pixel,高清图像观测像素数>10亿
- 全范围高清观测周期<1小时
- 眼球最大运动速度360°/s,转角分辨率0.0056°
- 观测距离范围:1m~1.2km,观测范围:1m范围外无死角观测
- 测距精度误差0.5%
- 视觉观测频率75Hz,红外观测频率50Hz,多传感器同步误差<1us
微信客服

打开微信
“扫一扫”
发需求 | 企业创新管家

接需求 | 专家小助手
